Print / download the product sheet
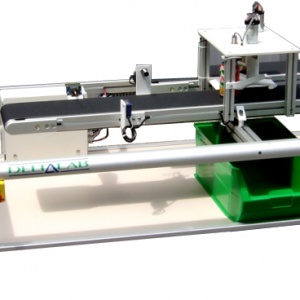
Print / download the product sheetThe TRIAXE is a 3-axis system using different technologies.
This equipment is a scaled-down replica of a stacker crane used in nuclear power plants.
It allows the storage of highly radioactive waste in a suitable basin.
This waste represented in the form of fuel rods is stored in cavities located in the basin. As part of the TRIAXE, 2 storage areas each with 4 locations are available.
Actuators :
- 24v brushless motor (with 12-point integrated encoder)
- DC motor with ball screw system, motor on / off action with 2 positions
- Pneumatic cylinder �20 double acting with all or nothing action
- Pneumatic pliers (3 fingers) mounted at the end of the pneumatic cylinder. Two position monostable forceps
Detectors :
"Room presence" sensors storage location :
- Optical fiber, - Inductive sensor,
- capacitive sensor,
- Mechanical limit stop with roller
- Sensors available on the X axis:
- 2 mechanical limit stops with roller for overtravel
- 1 12-point encoder for positioning the axis
- Sensors available on the Y axis:
- 2 mechanical limit stops with roller
- 2 inductive sensors for positioning the axis
- Sensors available on the Z axis:
- 2 magnetic ILS detectors for the position of the descent cylinder - 1 magnetic detector on the pneumatic clamp
The sensors are mainly mounted on plug-in connectors (for a replacement or a thorough study of the component)
Human Machine Interface :
- Remote console on a mobile arm arranged on the front of the system. It has 2 modes of operation (Footsteps and
automatic).
- Manual control of the system on the remote console, as well as an emergency stop.
- Door equipped with a safety sensor (coded magnet) and connected to a standardized safety relay.
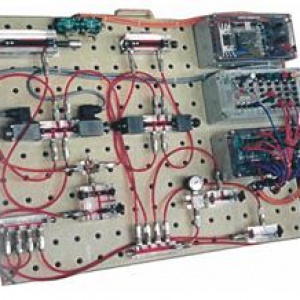
PLC :
- PLC (supplied with its cable and programming software),
- Communication card with RS485 output to communicate with the dialogue console.
Supervision:
This application made under the PLANT VUE software allows dialogue with the TRIAXE system controller. The communication protocol used is Modbus Ethernet.
This supervision has 2 modes :
- Administrator (full access)
- guest (limited access)
Several synoptics are proposed :
- Synoptic main : It allows to set the different displacements by clicking on the point of origin and the point of arrival and to visualize the dynamic evolution of the system in real time.
- Alarms : The present faults are displayed in list form. This screen is used to view the history of alarms and events.
- Synoptic configuration : This page is reserved for administrator mode.
It allows in particular the adjustment of the X axis (Brushless motor speed and position).