

SPÉCIFICATIONS TECHNIQUES
Un banc d’essai comprenant :
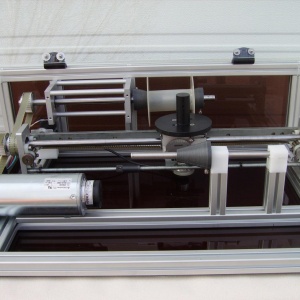
– Un boîtier UHING monté sur support avec dispositif pour mettre en oeuvre une opération
de trancannage.
– Deux bobines permettent de régler le dispositif et de réaliser cette
opération avec des fils de différents diamètres.
– Un moteur à courant continu.
Des capteurs permettent de mesurer en temps réel :
– La vitesse de rotation du moteur par génératrice tachymétrique.
– La vitesse de translation du boîtier par génératrice tachymétrique.
– Le courant moteur, image du couple.
– La position angulaire de l’axe du roulement formant écrou en fonction du temps durant la
période de retournement par capteur potentiométrique.
Un capteur d’effort permettant de tester la force limite de glissement.
-Un boîtier de commande avec :
Un variateur électronique 4 quadrants. Les consignes d’entrée imposées au moteur
par le variateur sont de type : échelon de vitesse, rampe de vitesse, vitesse
sinusoïdale.
Une carte d’acquisition National Instruments permet d’accéder à une fréquence de
10 000 Hz. Ce niveau de mesure permet d’étudier la phase de retournement qui dure
environ 0,1 seconde.
Un afficheur pour la vitesse de rotation du moteur.
Un commutateur pour fonctionnement en mode manuel ou par logiciel.
– Un logiciel de pilotage et d’acquisition
COMPLÉMENT:
Boîtier UHING pour manipulation EX1220
Boîtier avec capot en plexiglas permettant la visualisation du
fonctionnement mécanique du système (réglage du pas et
changement de sens).